 定时任务
定时任务
机器人定时任务包含3中不同的方式,其是在APScheduler模块上进行的封装
# 1.interval
这是最常用的task类型,其作用是让机器人隔一段时间就来执行一下某一个函数
@bot.task.add_interval() # 在这里传入参数,设定任务时间
async def task_interval_def(): # 函数不需要入参
...
具体的参数可以参考编译器的代码补全,所有的参数类型都是字面意思
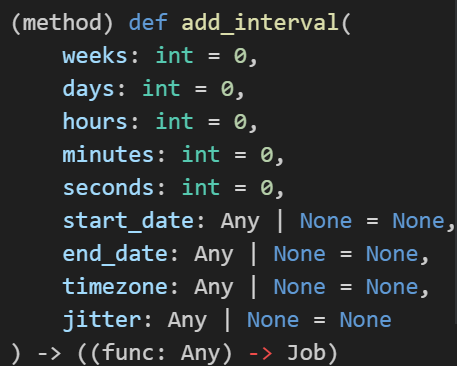
比如按如下设定,那么机器人就会在开机后开始计时,每1分钟执行一次;
@bot.task.add_interval(minutes=1)
async def task1():
...
你也可以传入多个时间,最终的执行时间是参数的和;
@bot.task.add_interval(minutes=26,seconds=20)
async def task2():
...
# 2.cron
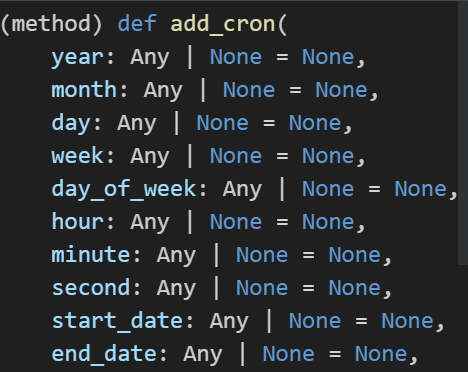
cron类型task是让机器人到指定时间运行函数,比如:
- 每天的1点0分
- 每周周1的0点
- 每月1日的12点
- ...
你可以通过不同的参数设定,来实现在不同的时间段执行对应的函数;
@bot.task.add_cron() # 传入时间设定参数
async def task_cron_def(): # 函数不需要入参
...
请注意,为了明确该函数执行的时间,必须要给add_cron传入timezone时区参数,如果想使用东八区,请设置参数为 Asia/Shanghai 字符串(其余时区自行百度)
# 每天早上8点0分执行函数 (东八区)
@bot.task.add_cron(hour=8, minute=0, timezone="Asia/Shanghai")
async def auto_skin_notify_task():
...
具体的传参参考IDE的代码补全
在APScheduler的类中可以详细看到每一个入参应该如何传入参数;
其中day_of_week参数既可以传入每周的字符串,如mon代表周一、sun代表周日;又可以传入0到6代表周一到周日。请注意,在这个函数中,每一周的第一天始终是周一!
class CronTrigger(BaseTrigger):
"""
Triggers when current time matches all specified time constraints,
similarly to how the UNIX cron scheduler works.
:param int|str year: 4-digit year
:param int|str month: month (1-12)
:param int|str day: day of month (1-31)
:param int|str week: ISO week (1-53)
:param int|str day_of_week: number or name of weekday (0-6 or mon,tue,wed,thu,fri,sat,sun)
:param int|str hour: hour (0-23)
:param int|str minute: minute (0-59)
:param int|str second: second (0-59)
:param datetime|str start_date: earliest possible date/time to trigger on (inclusive)
:param datetime|str end_date: latest possible date/time to trigger on (inclusive)
:param datetime.tzinfo|str timezone: time zone to use for the date/time calculations (defaults
to scheduler timezone)
:param int|None jitter: delay the job execution by ``jitter`` seconds at most
.. note:: The first weekday is always **monday**.
"""
再次提醒,不管你使用那个参数设定运行时间,都需要传入时区参数明确目标时区。
# 3.date
这个task和前两者不同,它只会在设定的时间执行一次任务;
同时,它也可以不传入参数,则函数会在机器人启动后立即执行(注意区分start_up任务)
@bot.task.add_date()
async def test_date_task():
...
比如按如下方式传入参数,那么机器人就会在启动后过10秒执行一次这个函数
from datetime import datetime,timedelta
@bot.task.add_date(( datetime.now() + timedelta(seconds=10)),timezone='Asia/Shanghai')
async def test_date_task():
...
同样的,为了明确运行时间,也需要传入timezone时区参数;如果你担心出错,那就无差别地将所有task都传入时区参数,保证无误;
# 4.on_startup
除了上面3个基于APScheduler的任务类型之外,还有一个专门的启动任务,其使用方法如下
@bot.on_startup
async def bot_start_task(bot: Bot):
...
这个任务会在机器人启动前执行!
- add_date不传参数时,会在机器人启动后执行,此时机器人已经可以响应命令
- on_startup会在机器人启动之前执行,此时机器人不可以响应命令
你可以根据自己的需要,选择合适的task类型
# 5.on_shutdown
顾名思义,这个函数会在进程收到信号退出的时候执行,比如键入CTRL+C(在LINUX下是2号信号)机器人在进程退出之前执行。
适合在内部做一些垃圾回收操作,比如释放数据库链接、将dict的内容以json方式保存到本地文件等操作...
@bot.on_shutdown
async def test_shutdown_task(b:Bot):
...
除了使用on_shutdown,你还可以给机器人设立一个只有开发者可以执行的机器人退出命令,并在命令内部实现垃圾回收+安全退出操作。为了避免其他人错误调用这个命令,你可以通过判断消息来源的用户ID的方式,让该命令只能由一部分用户调用。
import os,aiohttp
BOT_TOKEN = "你的机器人token"
MASTER_ID = "预先定义的管理员用户id"
async def bot_offline():
"""下线机器人的api调用"""
kook_headers = {f'Authorization': f"Bot {BOT_TOKEN}"}
url = "https://www.kookapp.cn" + "/api/v3/user/offline"
async with aiohttp.ClientSession() as session:
async with session.post(url, headers=kook_headers) as response:
res = json.loads(await response.text())
return res
@bot.command(name='kill')
async def kill_bot_cmd(msg: Message, *arg):
"""机器人退出命令"""
try:
print(f"recv /kill cmd from Au:{msg.author_id}")
# 判断当前用户是否为预定义的管理员用户
if msg.author_id != MASTER_ID:
return await msg.reply("您没有权限执行本命令")
# 进行垃圾回收操作,如释放数据库链接等
...
# 提示用户即将退出机器人
await msg.reply(f"[KILL] 保存全局变量成功,bot下线")
res = await bot_offline() # 调用接口下线bot
print(f"Au:{msg.author_id} | [KILL] bot-off | {res}\n")
os._exit(0) # 正常退出程序
except Exception as result:
print(f"error in /kill cmd",traceback.format_exc())
os.abort() # 有异常也强制退出程序