 初始化
初始化
# 目录
# 1.前言
在 khl.py 中,绝大部分操作都需要基于 Bot 对象来执行。所以,要想让机器人跑起来,我们要先把机器人的身体做出来,有了身体,才能让这个机器人去做我们想要做的事情
阅读本文之前,请再次确认您已经在 kook开发者中心 (opens new window) 申请了开发者权限,并能正常进入 开发者机器人管理后台 (opens new window)
# 2.机器人管理后台
# 创建机器人
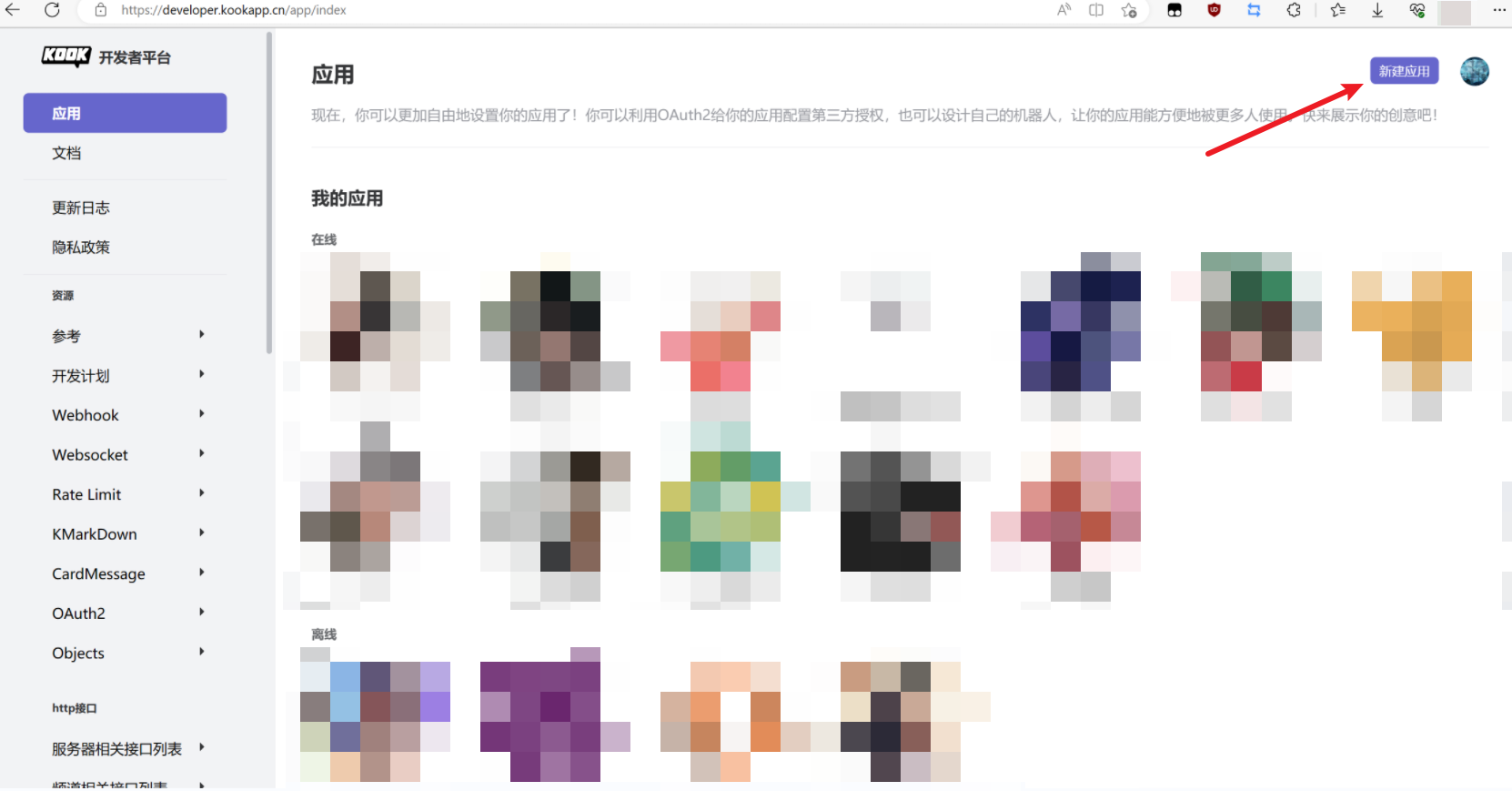
进入开发者后台-应用,点击右上角创建应用,即可创建一个新的机器人
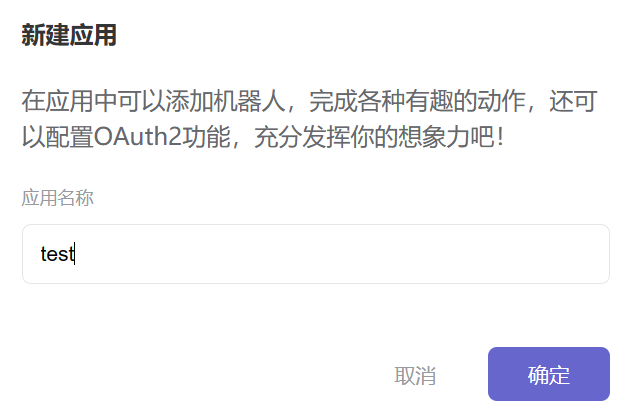
填入应用名称(即机器人名称,后续还可以更改),点击确定,创建机器人

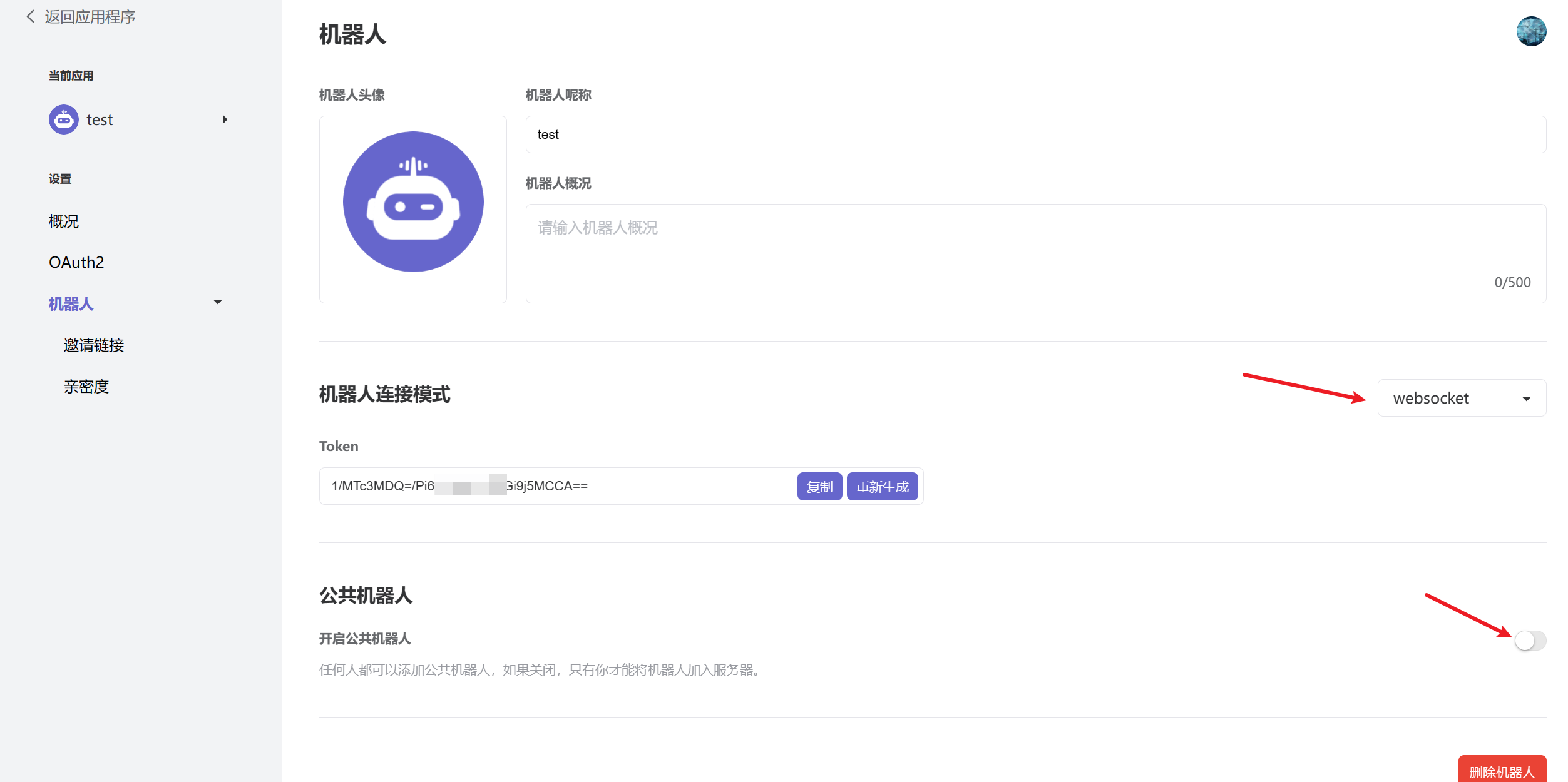
点击左侧 机器人 按钮,即可进入机器人 token 的页面。
# 获取机器人 token
在此页面,你可以
- 修改机器人的连接方式
- 获取机器人的token
- 是否开启公共机器人(若不开启,则只有机器人开发者可以邀请机器人到其他服务器)
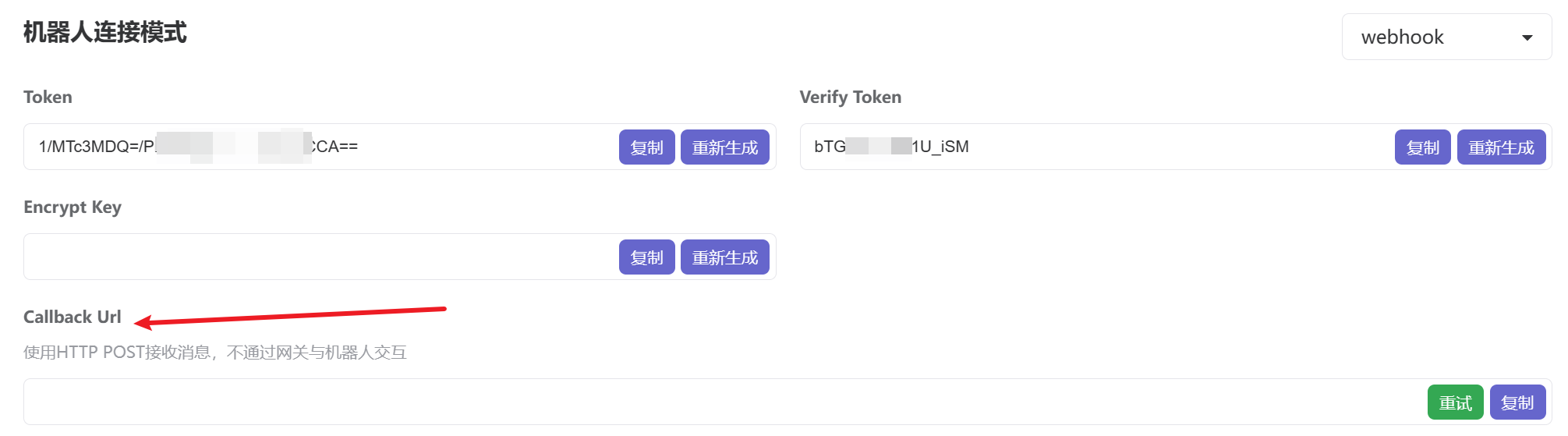
如果是webhook链接方式,则还需要填入机器人的 Callback Url
# 机器人权限
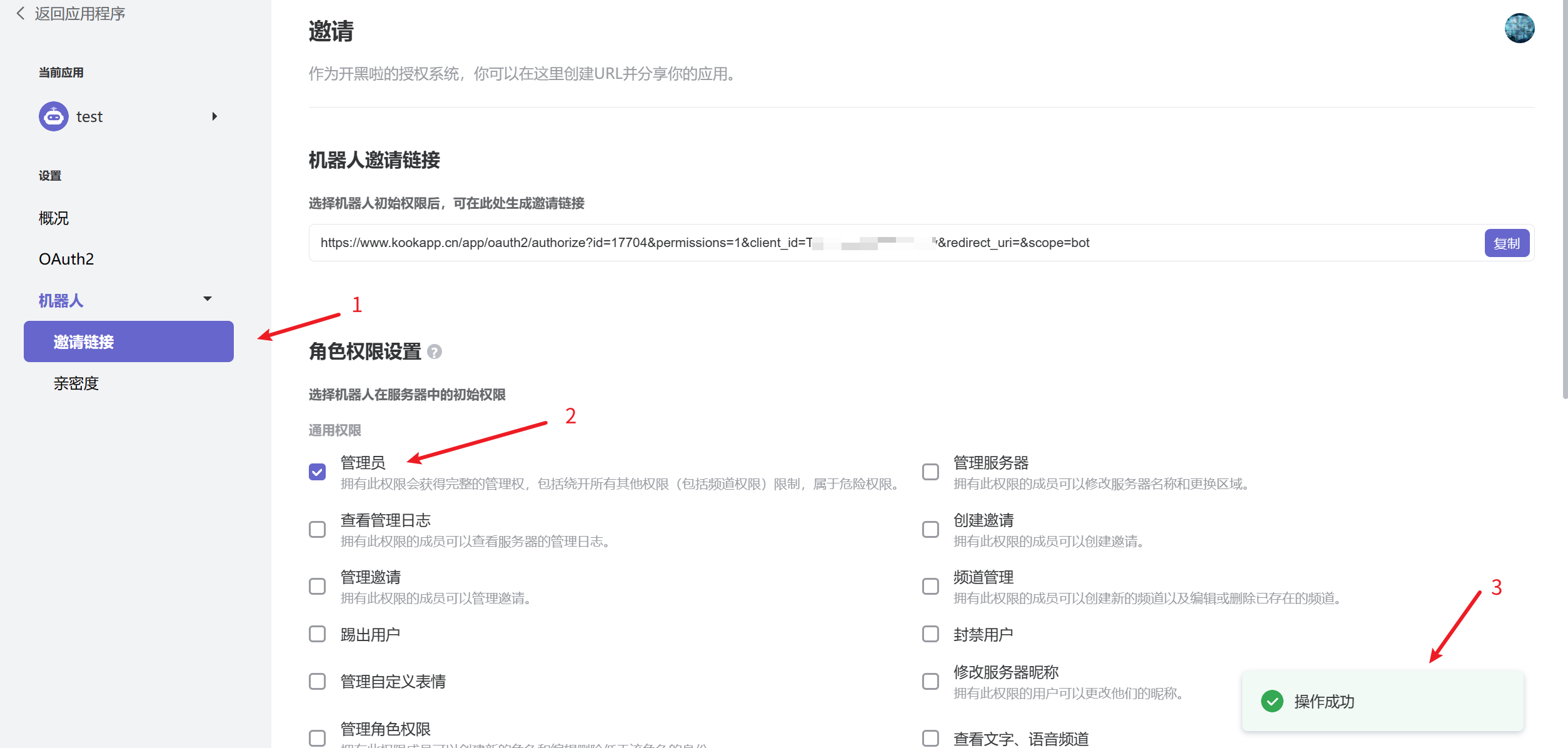
在 邀请链接 界面,您可以看到机器人的邀请链接,并可以设置机器人被邀请到服务器内的默认权限。
权限设置请按照机器人的功能进行选择。如果你不知道应该选择什么权限,可以无脑选择管理员。
# 3.两种连接模式
KOOK的机器人有两种连接模式:
- webscoket
- webhook
列个表,来看看二者的主要区别
| websocket | webhook |
|---|---|
| 不需要公网地址 | 需要一个可访问的公网地址 |
| 只需要token | 除了token,还需要verify-token和encrypt-key |
在 @musnows (opens new window) 的实测下,webhook 连接方式的稳定性略高于 websocket 。
- 如果你的机器人已经基本开发完毕,功能完好无bug,则更推荐使用 webhook 方式部署机器人,实现长期稳定运行;
- 如果你的机器人是部署在家中,无可用公网地址,则可以使用 websocket;
- 二者并没有严格意义上的孰强孰弱,根据自己的实际使用情况选择即可
知道了这两种方式的区别了,下面来看看如何给我们的机器人造一个身子吧!
# 4.实例化 Bot 对象
下面便是使用两种办法创建机器人对象的代码
# websocket
from khl import Bot
## websocket
bot = Bot(token = 'token')
# webhook
from khl import Bot, Cert
## webhook
webhook_port = 5000 ## 机器人webhook服务绑定端口,默认为5000
webhook_route = '/khl-wh' ## 机器人webhook服务器回调地址,默认为/khl-wh
## 按如上配置,回调地址是 http://ip:5000/khl-wh
## 将此地址填入kook机器人后台的callback url,即可上线机器人
## 记得开启云服务器防火墙中对5000端口的tcp访问
bot = Bot(cert = Cert(token='token',
verify_token='verify_token',
encrypt_key='encrypt_token'),
port=webhook_port,
route=webhook_route
)
# 可选参数
compress,是否压缩,默认为True- 其余参数基本用不上...
# 从文件读取 token
位了避免我们的机器人token在git仓库中泄漏,我们可以引入一个 config.json 文件,在其中写入机器人配置信息,并在启动机器人的时候,打开此文件,读取配置信息来初始化机器人
在机器人代码文件所在文件夹中,创建 config 文件夹,并在 config 文件夹中创建 config.json,写入如下内容
{
"token": "webhook/websocket bot token",
"verify_token": "webhook verify token",
"encrypt_token": "webhook encrypt token",
"webhook_port": 50000,
"using_ws": true
}
这个文件中包含了webhook/websocket所需的配置项
- 使用websocket,只需要填入
token字段,并将using_ws填为true - 使用webhook,还需要填入
verify_token/encrypt_token字段,选择需要绑定的端口填入webhook_port,并将using_ws填为false
对应的初始化机器人代码如下
import json
from khl import Bot, Cert
def open_file(path: str):
"""打开path对应的json文件"""
with open(path, 'r', encoding='utf-8') as f:
tmp = json.load(f)
return tmp
# 打开config.json
config = open_file('./config/config.json')
# 初始化机器人
bot = Bot(token=config['token']) # 默认采用 websocket
"""main bot"""
if not config['using_ws']: # webhook
# 当配置文件中'using_ws'键值为false时,代表不使用websocket
# 此时采用webhook方式初始化机器人
print(f"[BOT] using webhook at port {config['webhook_port']}")
bot = Bot(cert=Cert(token=config['token'],
verify_token=config['verify_token'],
encrypt_key=config['encrypt_token']),
port=config['webhook_port'])
为了避免 config.json 文件中的 token 泄漏,可以将其写入 .gitignore 文件。
在你的git存储仓库的根路径创建 .gitignore 文件,填入如下内容
config.json
这样就会在上传文件到 github/gitee 的时候,忽略掉 config.json
# 5.启动
有了机器人对象,添加了机器人功能模块(这部分将在其他文档中讲解)后,就可以让机器人跑起来了!
# 直接启动
以websocket连接模式为例,使用 bot.run() 函数启动机器人
from khl import Bot
## websocket
bot = Bot(token = 'token')
## 添加功能模块
## ......
## 开跑
if __name__ == '__main__':
bot.run()
webhook连接模式也同此操作。二者仅仅是初始化Bot对象时的参数不同!
# 什么是 __name__ ?
这里给没有系统学过python的其他编程语言选手讲解一下最后这个if语句的作用
所谓 __name__ ,可以理解为是python自带的一个全局变量,其会给每一个文件标识一个名字,写入到这个变量中。
而 __main__ 就是 __name__ 的一种,出现 __main__ ,就代表当前的 .py 文件是我们的入口文件
python test.py
此时 test.py 就是入口文件,__name__ == '__main__' 为真。
有了这个判断,bot.run()操作就只有你直接运行这个文件的时候,才会被执行。
# 和其他异步模块一起运行
除了直接运行,我们还可以给机器人进程添加其他异步模块,集合为单个进程运行
import asyncio
from aiohttp import web,web_request
from khl import Bot
## websocket
bot = Bot(token = 'token')
## 初始化节点
routes = web.RouteTableDef()
## 请求routes的根节点
@routes.get('/')
async def hello_world(request:web_request.Request):
return web.Response(body="hello")
## 添加routes到app中
app = web.Application()
app.add_routes(routes)
## 同时运行app和bot
HOST,PORT = '0.0.0.0',14725
if __name__ == '__main__':
asyncio.get_event_loop().run_until_complete(
asyncio.gather(web._run_app(app, host=HOST, port=PORT), bot.start()))
使用如上的代码,我们将在单个进程中,异步运行 aiohttp.web 实现的 http 请求处理器(app),和机器人本身(bot)
注意,如果这里的 aiohttp.web 服务需要外网访问,则一定要将 HOST 填为 0.0.0.0。如果是 127.0.0.1,是不支持外网访问的!
当然,如果你使用的是nginx进行反向代理以提供web服务,那么写成
127.0.0.1也是可以的。如果你不知道nginx和反向代理是什么,请去百度学习,或无脑设置成0.0.0.0;
将如上代码写入 test.py 文件
python3.10 test.py
运行程序,效果如下
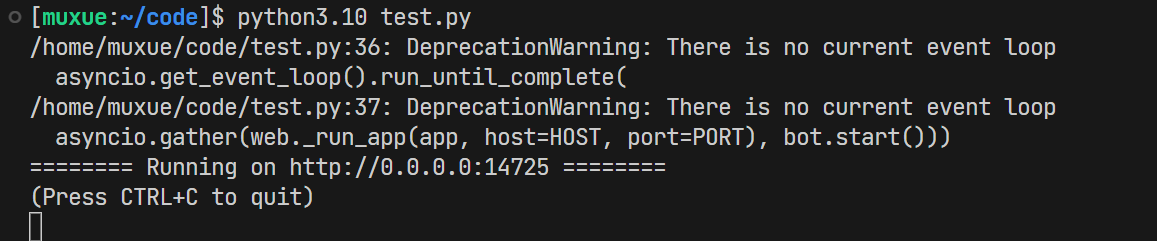
点击终端中的链接,可以在本地访问到 aiohttp.web 服务。
如果需要公网访问此链接,则需要修改为
http://公网ip:14725,并在防火墙中开启14725端口的tcp访问

此时,两个异步程序就在单个进程中运行了!
使用相同办法,你还可以实现两个完全不关联/不相同的独立机器人在单进程中执行。
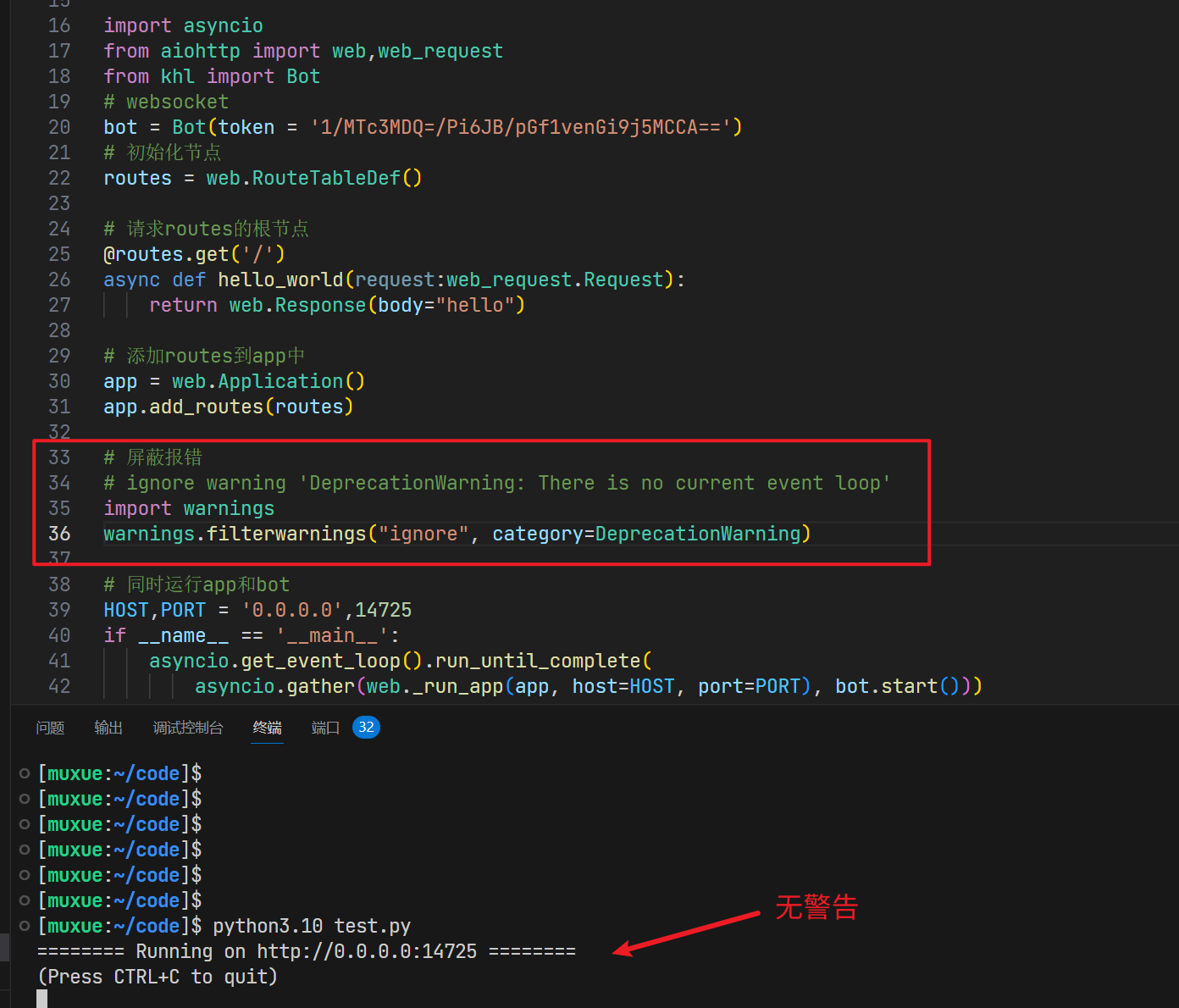
# 屏蔽 eventloop 警告
如果你使用asyncio.gather()来聚合两个异步loop,这里还会出现一个无关紧要的警告,其并不会影响程序正常运行。
我们可以添加如下代码,禁止掉这个警告:
## 屏蔽报错
## ignore warning 'DeprecationWarning: There is no current event loop'
import warnings
warnings.filterwarnings("ignore", category=DeprecationWarning)
# 后台运行(Linux)
# 使用 nohup 命令将机器人在后台运行
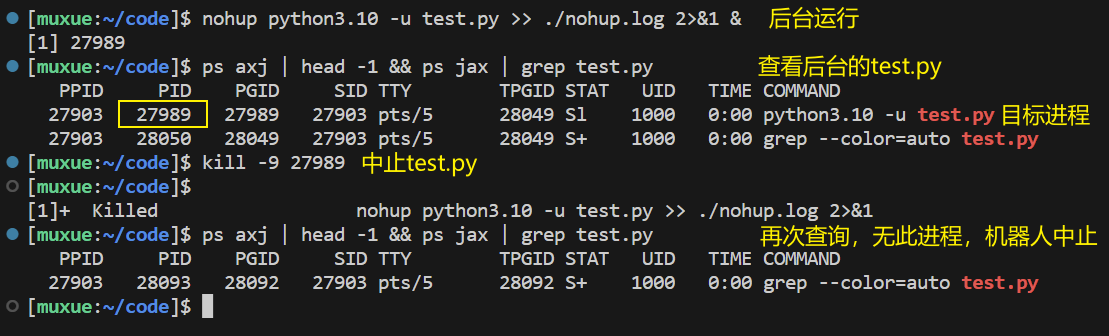
如果你使用的是 Linux 来部署机器人,使用 nohup 命令就能很方便地让机器人在后台运行。
nohup python3.10 -u test.py >> ./nohup.log 2>&1 &
此时会创建一个后台进程,并将机器人的所有输出重定向到当前目录下的 nohup.log 文件中。
如果想要找到对应的进程,可以使用 ps 命令来查询。
ps axj | head -1 && ps jax | grep test.py
这个命令会找到后台运行的 test.py 程序,此时可以给机器人程序发送信号,让其中止。
kill -9 进程号
进程号PID是 ps 命令输出结果中,第二列的数字。
# 使用 screen 命令将机器人在后台运行
如果你使用的是 Linux 来部署机器人,使用 screen 命令也能很方便地让机器人在后台运行
先执行如下命令,看看你的机器上是否已安装 screen。
screen
如果出现如下提示,则代表没有安装此命令
bash: screen: command not found
执行安装 screen 的命令
# centos
sudo yum install screen
# ubuntu
sudo apt-get install screen
安装完毕后,执行如下指令
screen -R bot
python3.10 test.py


此时会创建一个"屏幕",并将机器人的所有输出重定向到这个"屏幕"中。并且在SSH连接断开后也可继续运行。
如果想要连回创建的“屏幕”中,可以使用 screen -r [屏幕名称] 命令
screen -r bot

如果忘记连创建的“屏幕”名称,可以使用 screen -list 命令
该命令会列出所有创建的“屏幕”,找到你创建的“屏幕”后再执行screen -r [屏幕名称] 命令

# 后台运行(Windows)
参考 【知乎】如何在Windows下编写在后台一直运行的Python程序? (opens new window)
# Over
机器人初始化的基本操作就是这些了~